Final Demonstration
26th- 28th November 2019,
Warsaw, Poland & The Hague, The Netherlands




IN A NUTSHELL
WHAT? WHY?
The Final Demonstration (Final Demo) was the last Trial, concluding the series of DRIVER+ Trials. It also provided an opportunity to showcase the main outcomes of the Project.
The event had been tailored to the needs of the main End-User – the Emergency Response Coordination Centre (ERCC) – and was conducted in accordance with the project’s methodology. The ERCC, situated in Brussels, was created in 2001, following the European Parliament Decision on Union Civil Protection Mechanism (UCPM). It is the highest Crisis Management coordination body in the European Union. The primary aim of the UCPM is to strengthen cooperation between Participating States – Members States and others affiliated in the UCPM – in the field of civil protection, in order to respond to disasters as effectively and synergistically as possible. Since 2001, the UCPM has been activated over 300 times and each year the number of activations is growing. New innovative solutions, improving the realisation of the Union Civil Protection Mechanism tasks, are continually being sought.
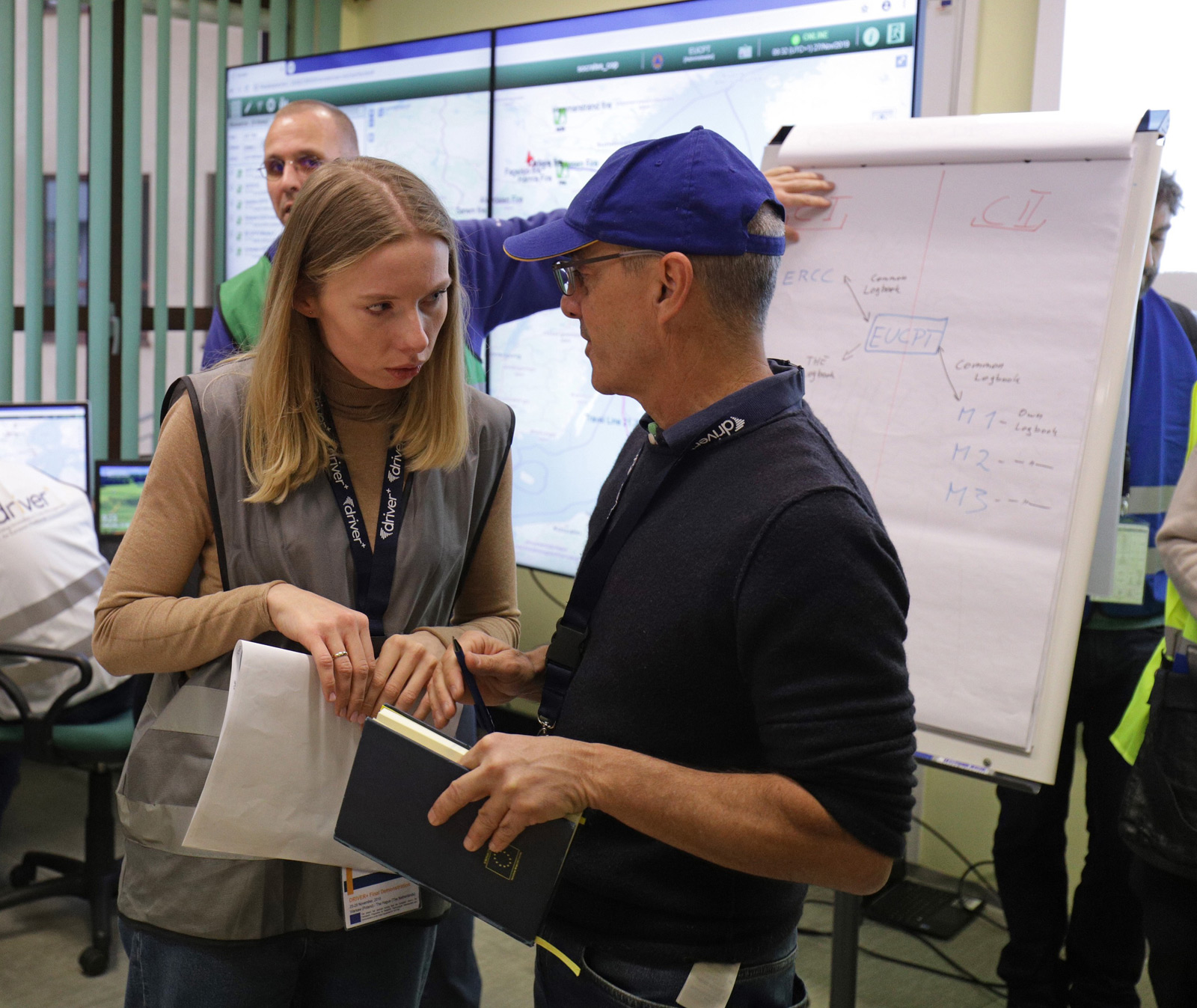
The ERCC monitors the situation from Brussels and has an expert support group deployed on the ground called the European Union Civil Protection Coordination Team (EUCPT). The main role of the EUCPT is to coordinate activities in the field by liaising between the UCPM Modules and the Local Emergency Management Authority (of the country stricken by a disaster), in order to provide a common understanding of the needs and to ensure a relevant and timely response.
The Final Demo addressed the communication aspects between the UCPM components, mainly the ERCC, the EUCPT and the Modules, which are sent to the country in crisis by states affiliated within the scope of the UCPM. The main areas addressed were:
• reporting on the operational activities from the field to the ERCC;
• information exchange among Team Leaders of the Modules, and the EUCPT;
• geo-information support for situation assessment and decision-making for Team Leaders of the Modules and the EUCPT.
The Final Demo’s overall goal, similar to the other four Trials, was to follow the DRIVER+ methodology and show if, and how, the innovative DRIVER+ solutions can minimise a specific set of identified gaps in Crisis Management.




Gap 1
Shortcomings in interoperability in the ability to exchange crisis-related information among agencies and organisation.
Gap 2
Lack of a “Common Operational Picture” to integrate data sources and calculation results from different models crucial for the decision making process.
Gap 3
Limitations in the ability to merge and synthetise disparate data sources and models (e.g. historic events, spreading models, tactical situation, critical assets map) in (near) real time to support decision making.
Organisation
WHO? WHERE?
The Final Demo was organised by the Space Research Centre of Polish Academy of Sciences with the support of Consortium Members, including: The Main School of Fire Service, the Joint Research Centre, Thales Communication & Security SAS, XVR Simulation BV, Frequentis AG and the Safety Region Haaglanden in The Hague. The Final Demo, as a command post exercise, had several locations. The different locations aimed to simulate remote conditions, in which different actors of the Union Civil Protection Mechanism work on a daily basis.
The Final Demo took place at the following locations:
The Emergency Response Coordination Centre (ERCC)
situated in the Space Research Centre of Polish Academy of
Sciences (Warsaw, Poland).

The European Union Civil Protection Team (EUCPT) located at the Main School of Fire Service (Warsaw, Poland).
4 Ground Forest Fire Fighting using Vehicles (GFFFV) Modules command posts placed in the Main School of Fire Service (Warsaw, Poland).

1 AirMedEvac Module command post in the Safety Region Haaglanden (The Hague, The Netherlands).
FINAL DEMO SCENARIO
MAJOR FOREST FIRE- EUCPM ACTIVATION
The fictional country Driverstan, situated outside the European Union but relatively close, is a democratic republic, however, is not yet as fully developed as the EU countries – it is lacking solid Crisis Management structures, a stable economy and a strong civil society. The scenario of the Final Demo focused on largescale forest fires in a rural area with potential developments, causing a complex humanitarian crisis.
Due to high temperatures and lack of rainfall during recent weeks, the number of forest fires is multiplying in the country. Domestic response capabilities are not sufficient to cope with the fires alone. Driverstan creates a Request for Assistance (RfA) that is shared with the ERCC, EU Member States and affiliated countries. The Union Civil Protection Mechanism was activated and offer of support from different countries was gathered.
The scenario expected to trigger an exchange of information between the ERCC, EUCPT and the National Disaster Management Authority (NDMA). The use of the DRIVER+ selected innovative solutions, tested alongside the standard operational procedures of the ERCC, EUPCT and Modules, demonstrated the potential added value of the solutions in such a Crisis Management situation.
What were the Solutions?
IN A NUTSHELL

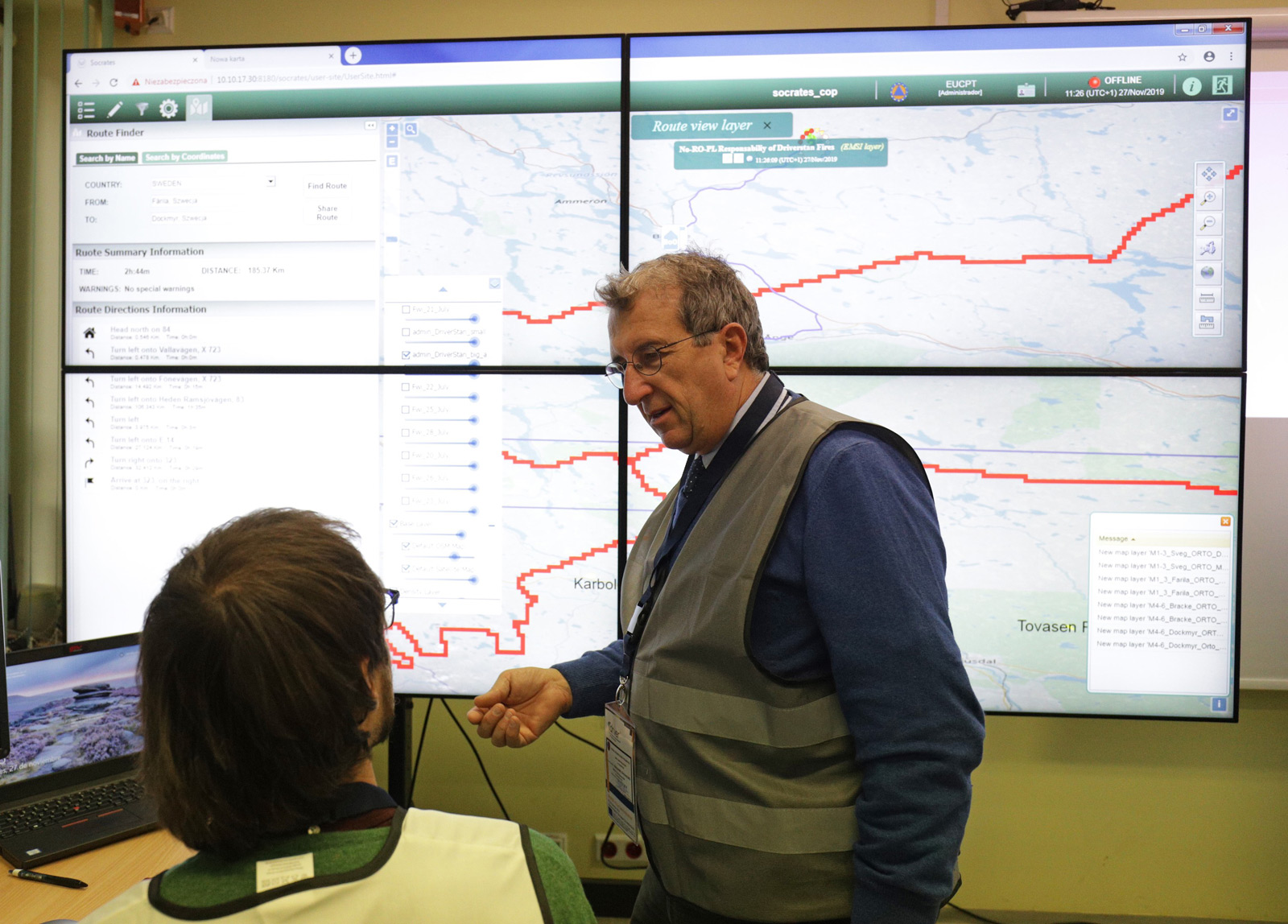
SOCRATES OC
SOCRATES Operation Center (OC) by GMV (Spain) sets up a Crisis Management network whose objective is twofold. It aims to improve the shared situation awareness amongst the different bodies involved in the management of crisis events, and to help the practitioners to make wellinformed decisions by providing and supporting the real time exchange of information about the operational situation. It provides a webbased tool for generating a Common Operating Picture (COP) in Crisis Management, presenting functions which enable the reporting and tracking of events and resources. It brings support to both vertical (local, regional, national and/or international levels of command) and horizontal (inter-agency and cross-border) coordination and cooperation.
Information on events and resources are displayed in a GIS (Geographic Information System). The solution allows crisis managers to determine the magnitude of the event, assessing its impact and potential consequences as well as evaluating the needs. They are also able to access real-time information about the availability and location of resources. SOCRATES OC also provides snapshots to operational commanders of what is being taken and by/with which resources. This enables them to establish action plans and determine further operational needs.

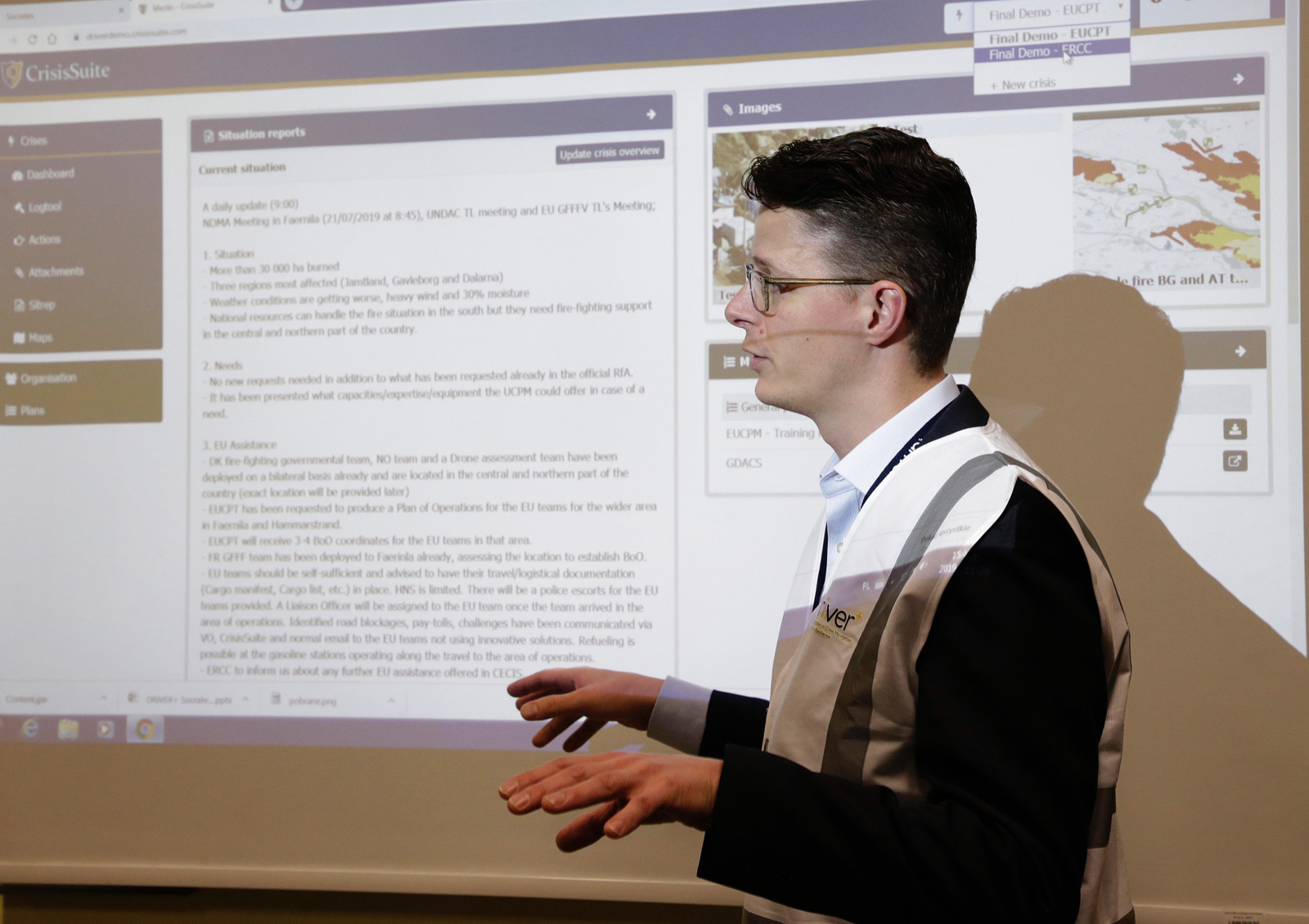
CRISISSUITE
CrisisSuite by Merlin Software B.V. is an online software application enabling organisations to successfully manage information during a crisis. All crisis information is securely stored in the cloud and is available anytime, anywhere. This solution supports the netcentric working method (an information management approach) of crisis teams by creating an universal picture of the crisis by sharing it horizontally and vertically with all the other teams in the crisis organisation. It also assists in maintaining an effective crisis meeting structure and it decreases the administrative workload for the people managing the crisis.
Each member of a crisis organisation gets access to CrisisSuite and has their own personalised dashboard with the crisis plans that are relevant to them, an overview of the current crisis and a list with all their unfinished actions for the current crisis. The actions are immediately forwarded to the appropriate teams or individuals; and they, in turn, can indicate that the actions are being carried out or completed. At the same time, a reply can be sent as well. The crisis team can follow the proceedings of the actions in a simple overview.
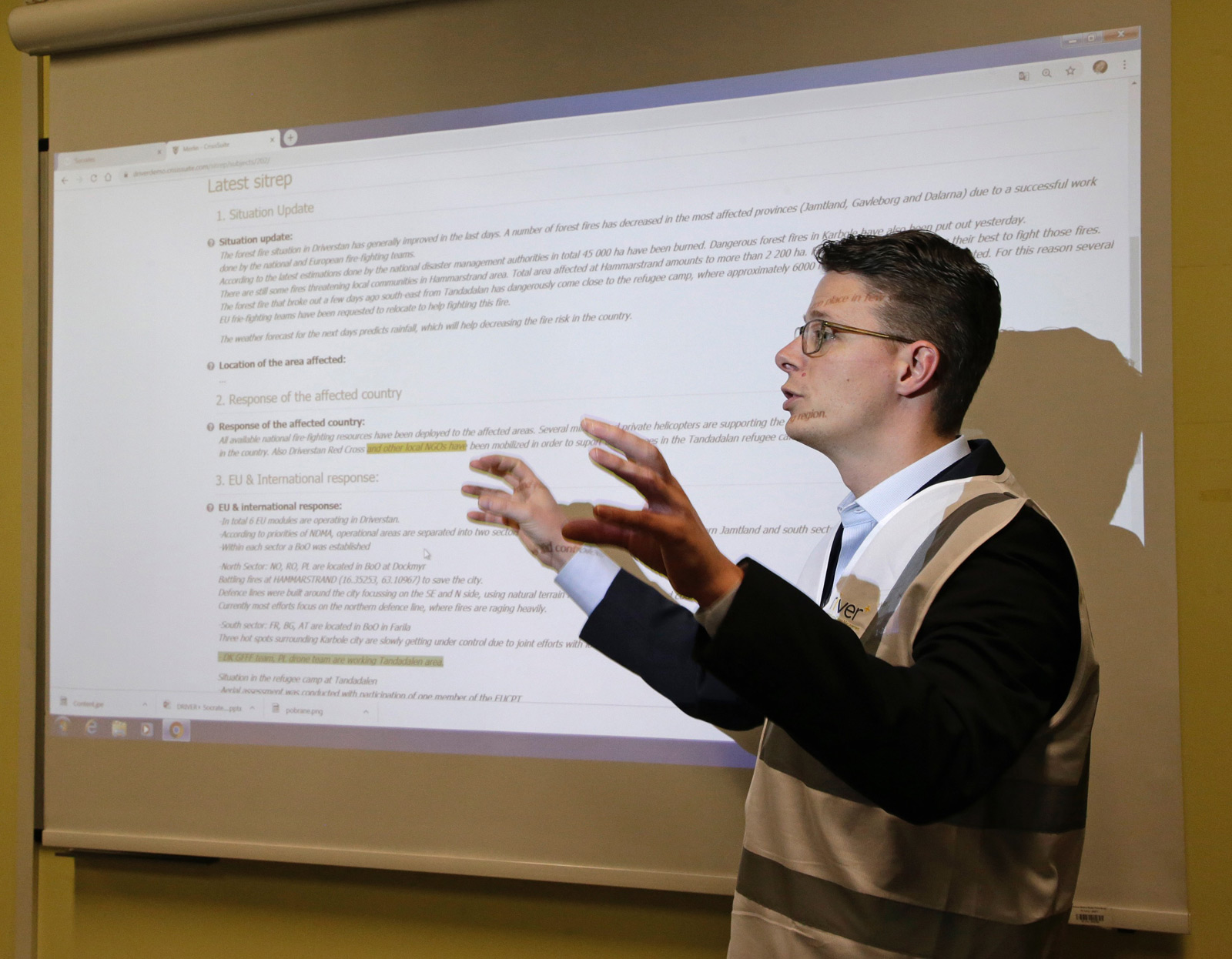
Based on the log, the crisis team may compile situation reports (SitReps) and share them with individuals, teams or with the entire organisation.
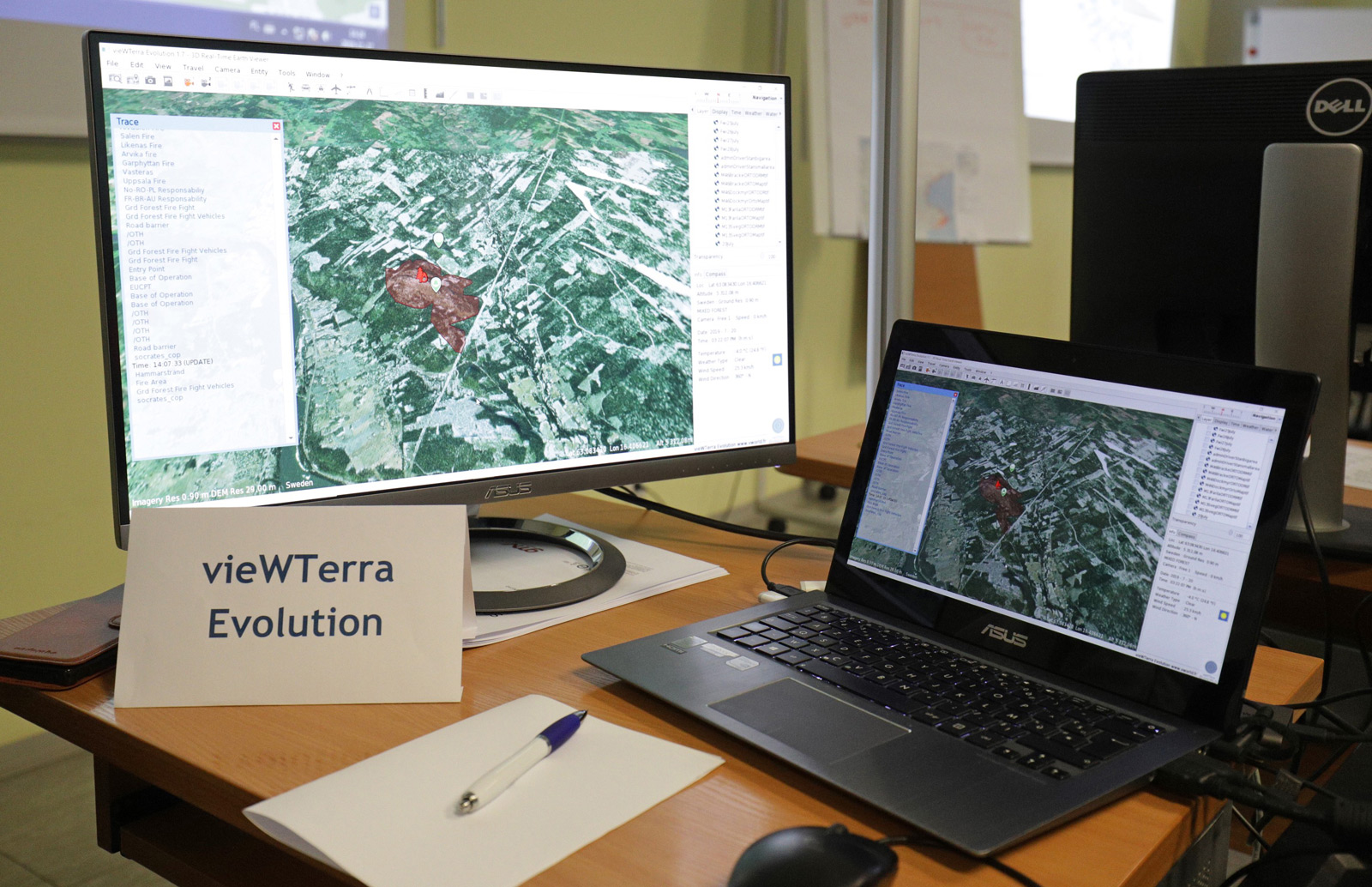
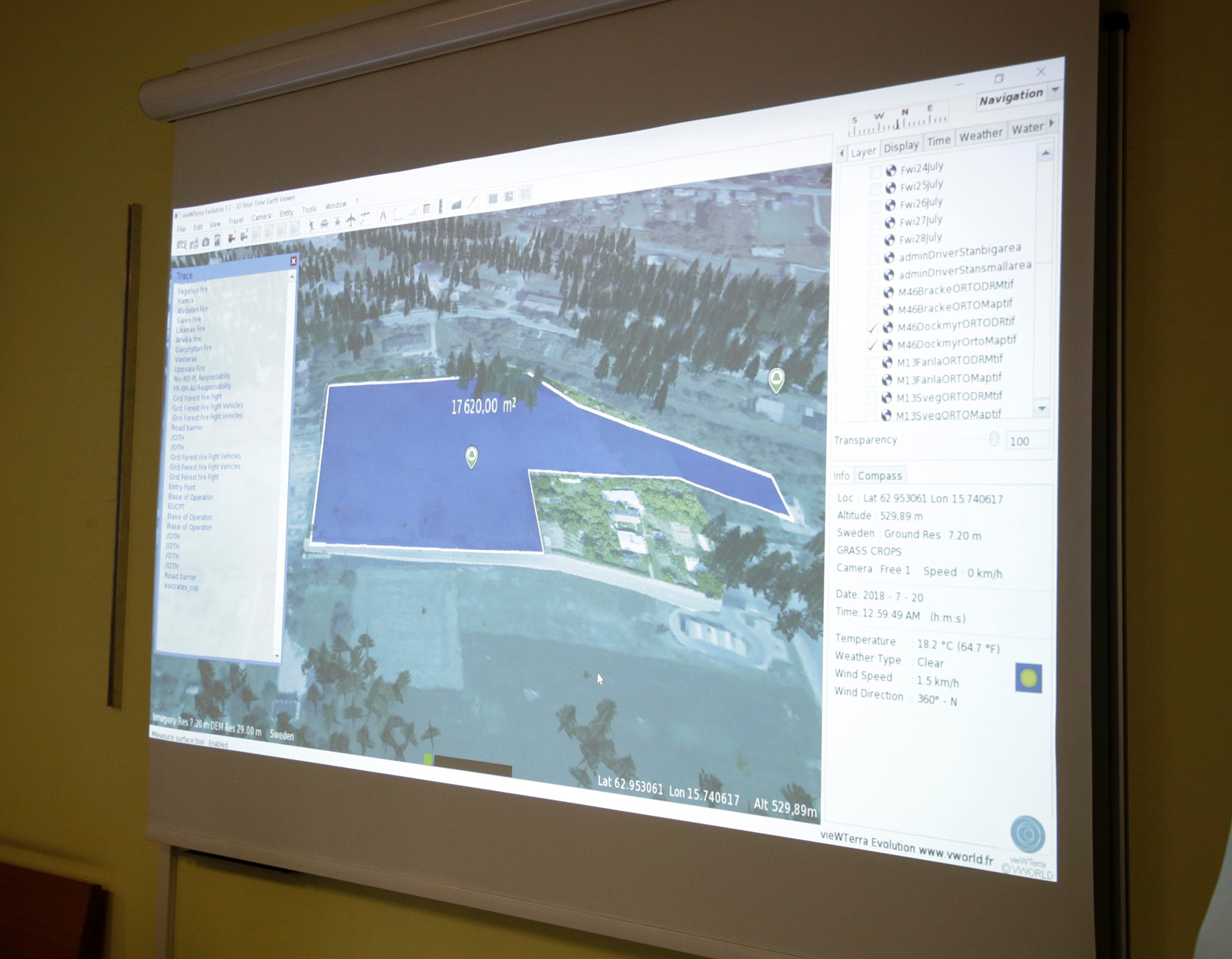
vieWTerra Evolution
vieWTerra Evolution by VWORLD is a 4D Earth Viewer as well as data & assets integration and development platform (C/C++ SDK). It presents an ellipsoidal model of the Earth already defined globally at a medium resolution (vieWTerra Base 29m Imagery, 90m– incoming 29m-DEM, 29m Land Cover set of mosaics), and allows its users to integrate their own precise datasets anywhere on the Globe, without any area coverage limitations, or access available Open Geospatial Consortium-compliant WMSWMTS data streams (imagery, cartography layers).
vieWTerra Evolution can be used to model any type of 3D scene on Earth and create scenarios at their real-world location to simulate events in the Crisis Preparedness phase, and to serve as global repository for building a custom earth-wide GIS, either used perfectly off-line or ported on an on-line architecture in order to allow the sharing of multiple information, data and assets between all stakeholders in the Crisis Response phase. Within the DRIVER+ Final Demo, it will notably be used to instantly visualise EFFIS Copernicus EMS fire danger maps and forecasts and newly-acquired imagery from drone acquisition, draped over the 3D environment for a more cognitive and immediate representation of the situation (data fusion). It will also allow joint visualisation of tactical and operational situation information (location of units, icons, firefront lines, etc.) entered through a third-party COP tool, as well as photos and reports from the field.
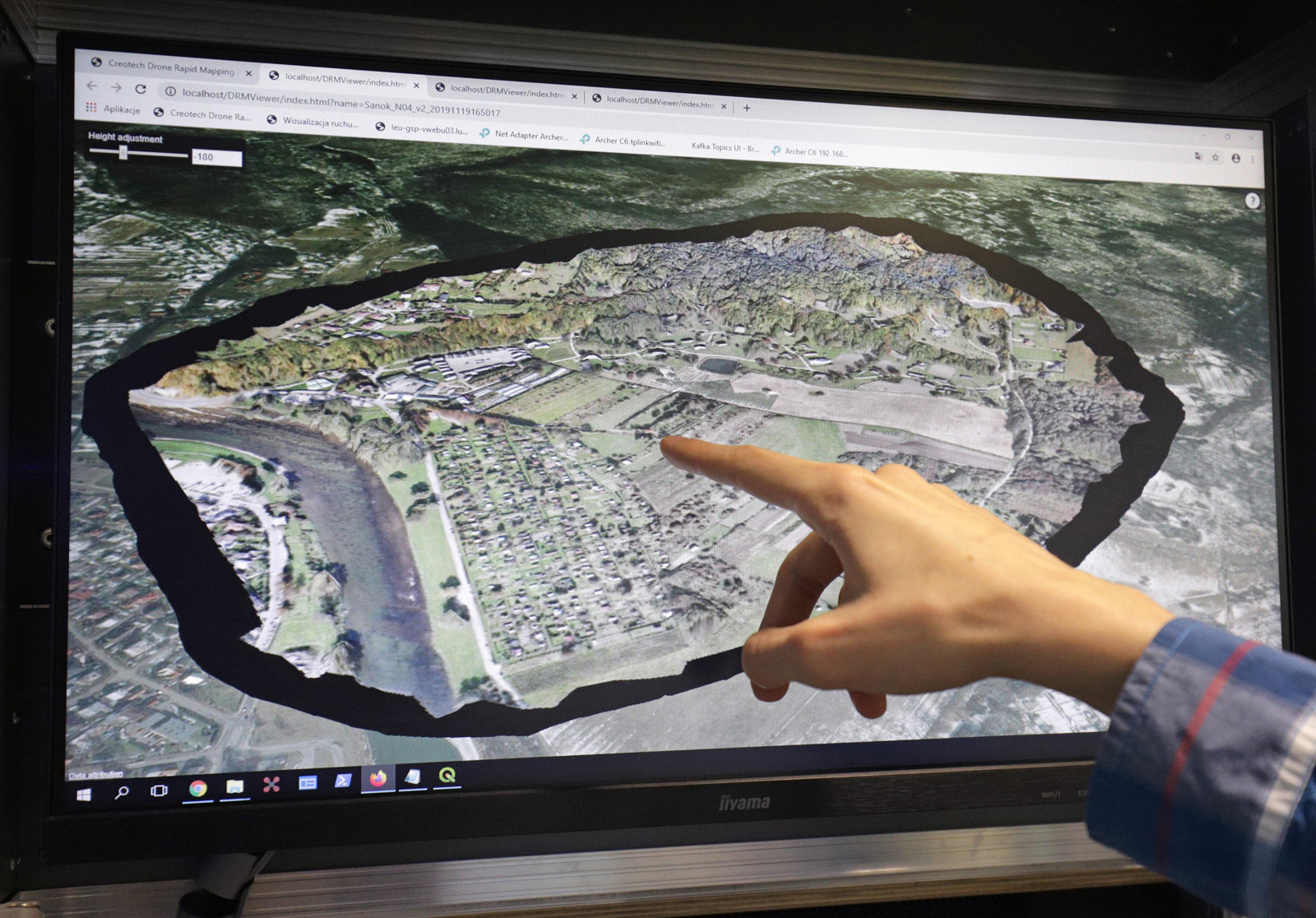
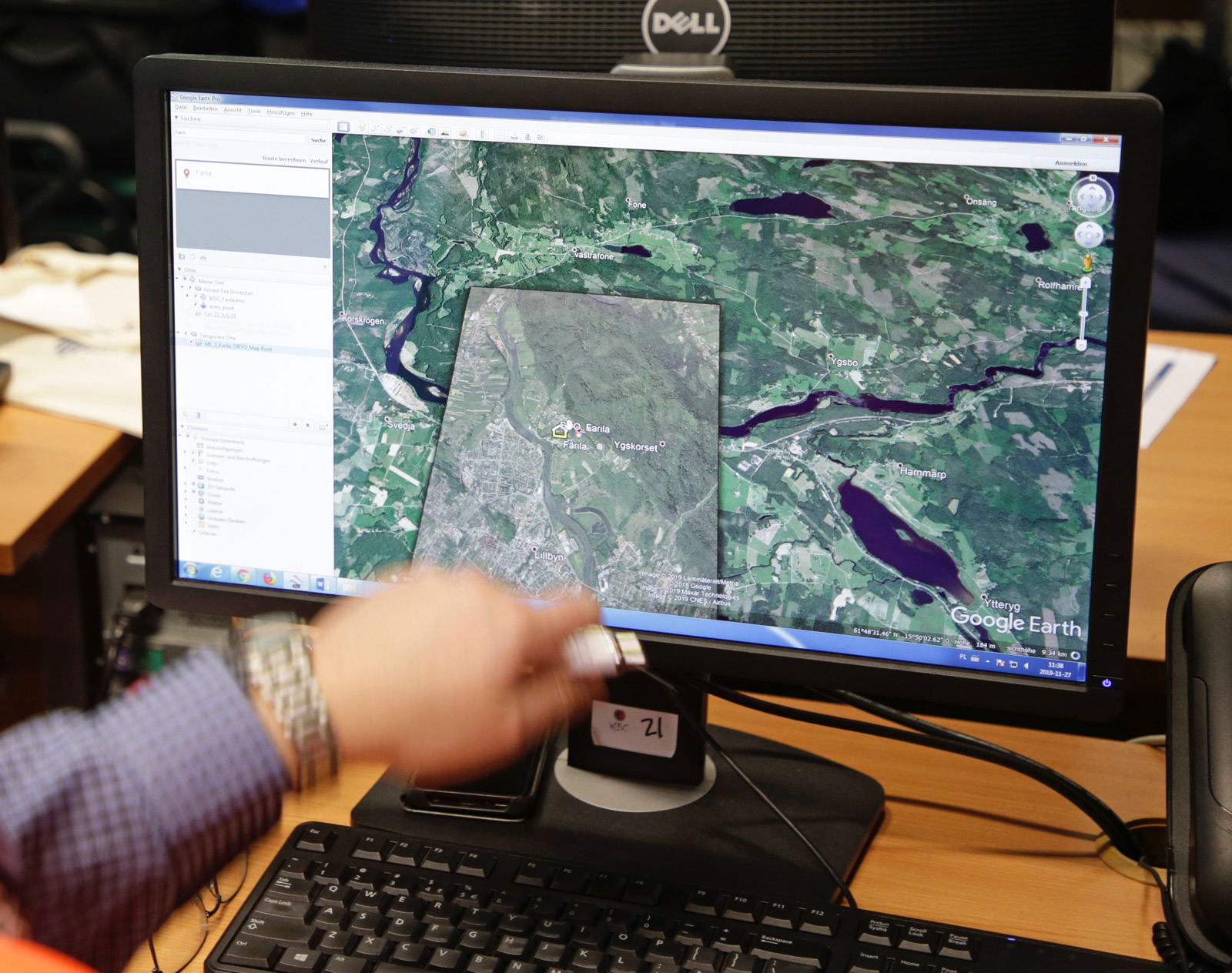
DRONE RAPID MAPPING
Drone Rapid Mapping by CREOTECH INSTRUMENTS enables an incident or a crisis area to be mapped quickly using local, network independent computing. A drone operator conducts a flight over an area of interest and acquires imagery (using the on-board camera) in line with the standard operational procedures. Data is then uploaded on the spot to the standalone and autonomous server (only a 230V AC power supply is required, with possible use of a portable generator) and automatically processed and viewed on the spot. The results can be shared locally via wireless LAN or published in another system when Internet connection is available.
What does Drone Rapid Mapping provide?
A very fast generation of orthophotomaps based on imagery acquired by any drone (RPAS) avai-lable to rescue or crisis management actors. The resulting maps and models can be viewed and analysed locally in the dedicated geoportal or published via Internet in any GIS environment already used by Crisis Management institutions. A 3D terrain model can be viewed in any stan-dard programme. It provides the practitioners with a better and more intuitive understanding of the area of interest.
The rapid mapping efficiency depends on the rugged server parameters – processors speed, memory size, GPU availability, etc. With an ave-rage HW configuration the mapping of 10 ha with 2 cm pixel takes up to 45 minutes. This pe-riod covers all activities: mission request, flight preparation, execution of the flight, landing, data retrieval and upload, all calculations with preparation of geoportal content. The genera-tion of the high-quality 3D model requires an additional 20+ minutes.

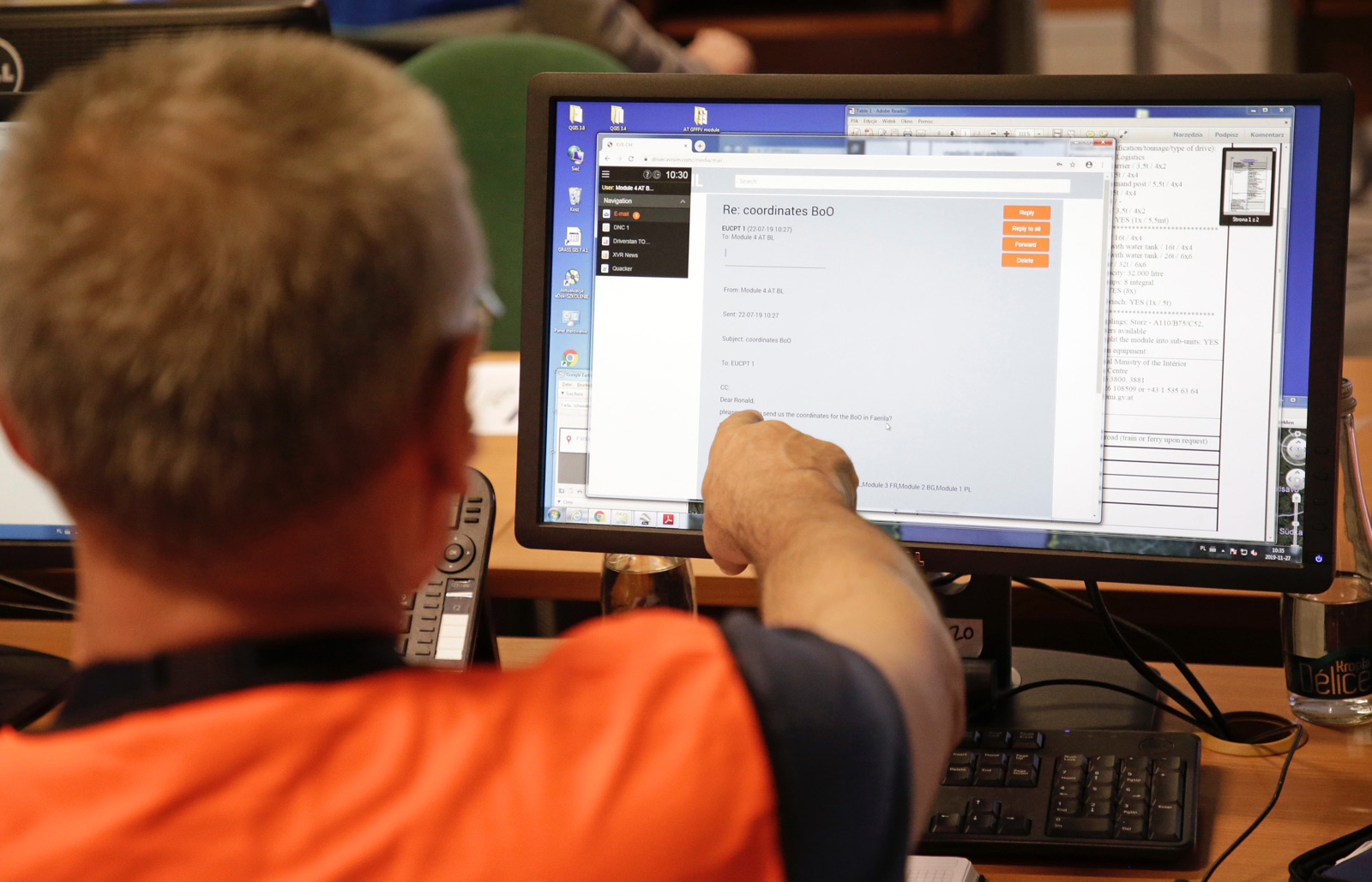
FIELD REPORTING TOOL
The Field Reporting Tool (FRT) by the Joint Research Centre was developed in order to provide first responders with the capability to share information from the field easily and promptly with two major key points:
• The information must be georeferenced. Not only this allows a more effective visualisation: it also improves the management of the resources deployed on the field, without requiring a specific activity, but naturally included in the operations performed by the
operators.
• The information must carry a valuable payload in terms of multimedia contents, which provides remotely a better understanding of the situation.